

English

技术与支持
Technology



什么是伺服?怎样实现伺服控制?
- 分类: 常见问题
- 发布时间: 2020-06-04 15:51:14
- 访问量: 0
伺服控制,即为满足某种目的,对产生的运动和对物体的运动进行控制的人类活动。所谓伺服控制指对物体运动的位置、速度及加速度等变化量的有效控制。这种控制已在各领域得到普及。伺服控制系统则指的是用来精确地跟随或复现某个过程的反馈控制系统。
一、伺服系统,大致上可分为下列几项:
1、指令部分:动作指令信号的输出装置
2、驱动部分:接收指令部分的输出,并驱动执行机构(比如电机)动作的装置
3、反馈部分:检测执行结构或者负载状态的装置
4、执行机构:接收驱动部分的输出信号产生转力矩、位置等状态

二、伺服内部结构:
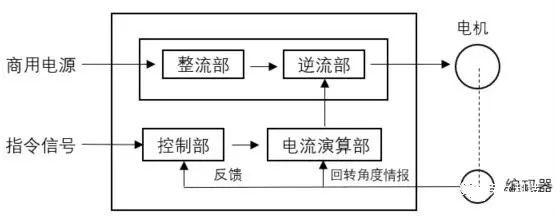
三、控制方式
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
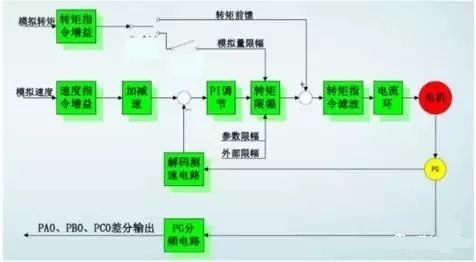
1、速度控制速度环框图
(1)速度制即电机按照给定的速度指令进行运转
(2)速度控制的应用场合相当广泾用场合有:需要快速响座的连续调速系统;由上位闭环的定位系统;需要多栏速度进行快速切换的系统。
(3)通常伺服的速度给定为模拟量,即模拟量幅值的大小决定了给定速度的大小,正负决定电机应关系取决于速度指令增益(Pn300)。
注意事项
(1)速度环增益Pn102,通常是设定高一些以使得整个系统响应快一些,电机刚性也会增强。但是增益大了可能导致系统振动。一般负载惯量大的场合该参数设得大一些。
(2)速度环积分时间Pn103,它的作用是消除静差,数值设得越大响应越慢,到达指令时间越长。通常负载惯量越大,积分时间应设定得越大。
(3)上位机作闭环时,应尽量不要设置软起动减速时间参数Pn306、Pn307。
(4)若没有上位机作闭环,希望通过模拟量来使得电机完全停止,则必须采用零钳位或比例控制。
(5)用上位机作位置闭环时,模拟量不能自动调零。
2、转矩控制
(1)非速度控制,控制输岀的转矩即为典型转矩控制。
(2)常使用于张力控制等场合
(3)输入为模拟量,模拟量大小与转矩大小的关系取决于转矩指令增益。
(4)举例:假定用户设定Pn400是100,则表明若输入10ν的模拟量时电机输出转矩可以达到其额定转矩的100%。
注意事项
(1)转矩控制首先应注意限制电机转速,电机转速可以用模拟量进行限制,也可以通过设置参数来限制转速。
(2)转矩指令增益Pn400数值设定越小,相同模拟量对应的转矩越大。
3、位置控制
位置控制普遍应用在各种定位场合,可以直接替换各种步进传动系统。一般情况下伺服通过接受脉冲来进行位置控制,脉冲的个数决定了位置,脉冲的频率决定了电机运行的速度。一个脉冲对应的位置当量,取决于机械结构和电子齿轮。
注意事项
(1)每一个点位的位移由两个参数组成,实际编程的位移是由两个参数的代数和组成,注意两个参数的单位。
(2)注意搜索参考点的速度,若速度过大可以设定软起动加减速,以减小对机械的冲击。
(3)点位控制中,1CN可以不接任何输入、输岀即可实现。
(4)目前只能顺序换步。
(5)用户可以通过触摸屏和伺服通过 Modbus协议进行通讯,进而可以通过触摸屏修改位置、速度等。
四、三种控制方式对比:
(1)如果对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
(2)如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
(3)就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
(4)对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。
扫二维码用手机看

手机网站

微信公众号
电话: 0731-86368555/15211128155
传真: 0731-86206655
邮箱: sale@aicortech.cn
地址: 长沙市天心区融城路18号